

Se pretende diseñar un circuito digital que muestre el resultado de la votación de un concurso musical de manera automática mediante el encendido de una lámpara (L). El jurado está formado por tres componentes. Cada uno dispone de un pulsador (J1, J2, J3) para emitir su voto, asignándoles el valor 1 en caso de votar SI y el valor 0 si se vota NO.
En el caso de que la persona que concursa obtenga dos o más votos favorables la lámpara se encenderá (L=1). En cualquier otro caso la lámpara permanecerá apagada (L=0).
- Obtener la tabla de verdad para la salida L del sistema, así como su función algebraica. (1 punto)
- Simplificar por el método de Karnaugh la función L del sistema, así como su función algebraica. (1 punto)
- En relación con los sistemas de control, explicar la función del regulador o controlador. (0.5 puntos).
a. Completamos la tabla de la verdad con tres variables y una salida con las condiciones del enunciado
| J1 | J2 | J3 | L |
| 0 | 0 | 0 | 0 |
| 0 | 0 | 1 | 0 |
| 0 | 1 | 0 | 0 |
| 0 | 1 | 1 | 1 |
| 1 | 0 | 0 | 0 |
| 1 | 0 | 1 | 1 |
| 1 | 1 | 0 | 1 |
| 1 | 1 | 1 | 1 |
Su función algebraica será (minterms):
![\[ L = \overline J_1 \cdot J_2 \cdot J_3 + J_1 \cdot \overline J_2 \cdot J_3 + J_1 \cdot J_2 \cdot \overline J_3 + J_1 \cdot J_2 \cdot J_3 \]](https://technoteacher.es/wp-content/ql-cache/quicklatex.com-87a52a3465b34ac732495b63c170a7c8_l3.png "Rendered by QuickLaTeX.com")
b. Dibujamos el mapa de Karnaugh para tres variables:
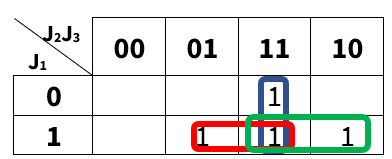
Que nos da una función simplificada:
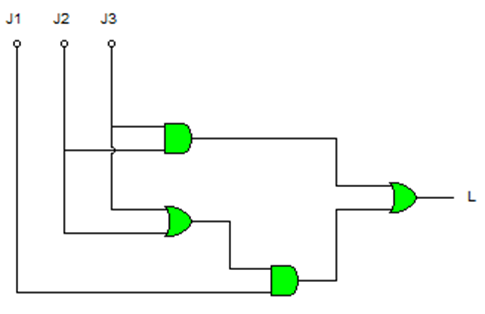
![\[ L = J_2 \cdot J_3 + J_1 \cdot J_3 + J_1 \cdot J_2 = J_2 \cdot J_3 + J_1 \cdot (J_2+J_3) \]](https://technoteacher.es/wp-content/ql-cache/quicklatex.com-f7633a8497bbc0ef085da2bfc56c4167_l3.png "Rendered by QuickLaTeX.com")
Cuya implementación es:
c. El regulador o controlador es el «cerebro» del sistema de control. Su función principal es mantener una variable de salida de un proceso (la variable controlada) lo más cerca posible de un valor deseado o de referencia (el punto de consigna o setpoint), a pesar de las perturbaciones que puedan afectar al sistema.
Para lograr esto, el regulador realiza las siguientes acciones clave:
- Recibe la señal de error: El controlador recibe información constante de un sensor sobre el estado actual de la variable que se desea controlar (por ejemplo, la temperatura de un horno, la velocidad de un motor, la presión en un tanque). Esta medida se compara con el valor deseado (punto de consigna). La diferencia entre la medida y el punto de consigna es lo que se conoce como señal de error.
- Procesa la señal de error: Basándose en esta señal de error y en algoritmos de control predefinidos (como los controladores PID: Proporcional, Integral y Derivativo, que son muy comunes), el regulador calcula una acción de control. Este cálculo determina cuánto y cómo debe ajustarse el proceso para corregir la desviación.
- Genera una señal de control: El regulador envía una señal de salida (la señal de control) a un actuador. El actuador es el elemento que directamente influye en el proceso (por ejemplo, una válvula que abre o cierra para regular un flujo, un motor que cambia su velocidad, un elemento calefactor que aumenta o disminuye la potencia).
- Corrige la desviación: El actuador, al recibir la orden del controlador, modifica la variable manipulada del proceso para que la variable controlada se acerque al punto de consigna. Este ciclo se repite continuamente, formando un bucle de retroalimentación (o lazo cerrado), lo que permite al sistema adaptarse y mantener la estabilidad frente a los cambios.