

a. Dada la siguiente tabla de la verdad, se pide:
| A | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 |
| B | 0 | 0 | 0 | 0 | 1 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 1 | 1 | 1 | 1 |
| C | 0 | 0 | 1 | 1 | 0 | 0 | 1 | 1 | 0 | 0 | 1 | 1 | 0 | 0 | 1 | 1 |
| D | 0 | 1 | 0 | 1 | 0 | 1 | 0 | 1 | 0 | 1 | 0 | 1 | 0 | 1 | 0 | 1 |
| F | 0 | 0 | 0 | X | 0 | 1 | 0 | X | 0 | 0 | 1 | 0 | X | 1 | 1 | 1 |
Nota: X representa un estado indiferente
a.1. Obtener la expresión de la función F lo más simplificada posible. (1 punto)
a.2. Diseñar un circuito que realice dicha función con puertas lógicas. (0.5 puntos)
b. ¿Qué se entiende por perturbaciones en un sistema de control y cuáles pueden ser sus causas? ¿Qué tipo de sistema de control es capaz de corregir el efecto de las perturbaciones en la variable controlada? Razonar la respuesta. (1 punto)
a.1. Dibujamos el mapa de Karnaugh para cuatro variables:
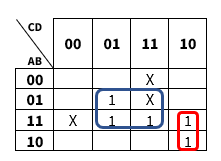
En el que hemos utilizado los estados indiferentes a nuestra conveniencia para realizar las agrupaciones más beneficiosas a la hora de simplificar.
La función F vendrá dada por:
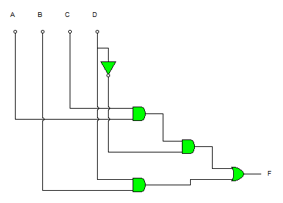
![\[ F = BD + AC \overline D \]](https://technoteacher.es/wp-content/ql-cache/quicklatex.com-a7f323005e8042e47961beabe1d6144c_l3.png "Rendered by QuickLaTeX.com")
a.2. El circuito implementado con puertas lógicas es:
b. Las perturbaciones en un sistema de control son señales externas que no son deseadas y que afectan al comportamiento del sistema alterando la variable controlada. Las causas pueden ser desde ruido eléctrico producido por interferencias con sensores o actuadores del sistema, desgaste o mal funcionamiento de los componentes del sistema, cambios físicos en el entorno como la humedad, presión, temperatura etc., variaciones en las demandas de un sistema, como un motor que demanda más carga en un momento determinado.
Los sistemas de control que pueden corregir el efecto de las perturbaciones son los sistemas de control de lazo cerrado, que corrigen automáticamente el efecto de las perturbaciones sobre la variable controlada. Esto lo realizan gracias a que, a través de la realimentación, están midiendo continuamente el nivel de señal en la salida mediante sensores, comparan con el valor de consigna y ajustan la acción de los actuadores para minimizar la señal de error.