Un dron de cuatro motores lleva a bordo un circuito digital que ayuda a garantizar la seguridad del vuelo. Se quiere diseñar este circuito para gestionar una señal de alarma A que se active (A=1) cuando fallen dos o más motores del sistema aéreo. Estos fallos en los motores se indican mediante cuatro señales de control de avería M1, M2, M3 y M4, cuyas salidas toman en valor 1 si el motor correspondiente está averiado.
- Obtener la tabla de la verdad para la función A, así como su expresión en forma canónica. (1 punto)
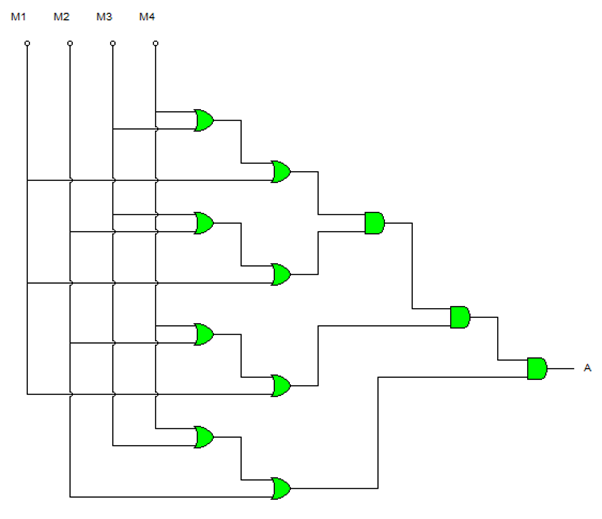
- Simplificar la función A por el método de Karnaugh e implementarla con puertas lógicas. (1 punto)
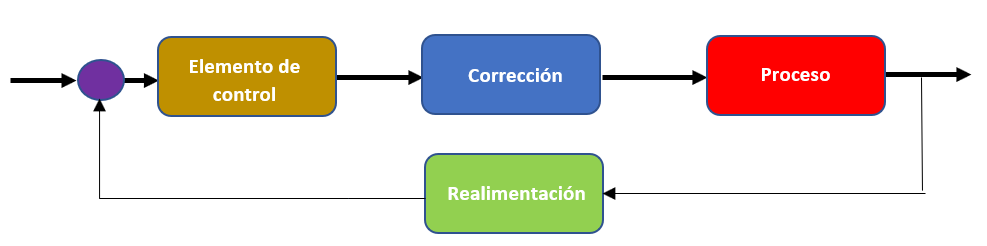
- En relación con los sistemas de control, explicar las diferencias entre los sistemas de lazo abierto y los de lazo cerrado. Representar los diagramas de bloques de ambos sistemas. (0.5 puntos)
a. Completamos la tabla de la verdad con las condiciones del enunciado.
| M1 | M2 | M3 | M4 | A |
| 0 | 0 | 0 | 0 | 0 |
| 0 | 0 | 0 | 1 | 0 |
| 0 | 0 | 1 | 0 | 0 |
| 0 | 0 | 1 | 1 | 1 |
| 0 | 1 | 0 | 0 | 0 |
| 0 | 1 | 0 | 1 | 1 |
| 0 | 1 | 1 | 0 | 1 |
| 0 | 1 | 1 | 1 | 1 |
| 1 | 0 | 0 | 0 | 0 |
| 1 | 0 | 0 | 1 | 1 |
| 1 | 0 | 1 | 0 | 1 |
| 1 | 0 | 1 | 1 | 1 |
| 1 | 1 | 0 | 0 | 1 |
| 1 | 1 | 0 | 1 | 1 |
| 1 | 1 | 1 | 0 | 1 |
| 1 | 1 | 1 | 1 | 1 |
Vamos a obtener la 2ª forma canónica (maxterms), tomando las salidas que tiene valor 0 como productos de sumas de los valores de las variables.
![\[ A= (M_1+M_2+M_3+M_4) \cdot (M_1+M_2+M_3+ \overline {M_4}) \cdot (M_1+M_2+ \overline {M_3} + M_4) \cdot (M_1+ \overline{M_2} + M_3 + M_4) \cdot (\overline {M_1} +M_2+M_3+M_4) \]](https://technoteacher.es/wp-content/ql-cache/quicklatex.com-89e27602ea40f90a59a70119414d9015_l3.png "Rendered by QuickLaTeX.com")
b. Dibujamos el mapa de Karnaugh para cuatro variables:
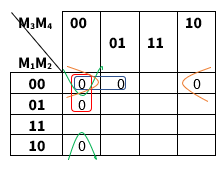
De donde obtenemos la expresión:
![\[ A = (M_1+M_3+M_4) \cdot (M_1 + M_2+M_3) \cdot (M_1+M_2+M_4) \cdot (M_2+M_3+M_4) \]](https://technoteacher.es/wp-content/ql-cache/quicklatex.com-024ef69b71e0fb0fbe242bf89963f3fb_l3.png "Rendered by QuickLaTeX.com")
La implementación con puertas lógicas:
c. En los sistemas de control, en los sistemas de lazo abierto la señal de entrada es independiente de las señal de salida. No existe mecanismo alguno que compare la salida real con la deseada. Son más sencillos, económicos y estables, pero son imprecisos y no pueden compensar las perturbaciones.

En los sistemas de lazo abierto, los cuales tienen una realimentación, se mide continuamente la señal de salida y se compara con la de entrada, obteniéndose así una señal de error, utilizada por el controlador para ajustar la acción de control y minimizar el mismo. Son más preciso y robustos frente a las perturbaciones, pero son más complejos, caros y pueden presentar problemas de inestabilidad si no se diseñan de forma correcta.